BAB I
PENDAHULUAN
1.1
Latar Belakang
Pada saat ini, teknologi game
dan animasi terus mengalami perkembangan. Animasi atau dalam bahasa inggrisnya
yaitu animate yang artinya menghidupkan, member jiwa dan menggerakkan benda
mati. Animasi tersebut merupakan proses membuat suatu objek yang awalnya
merupakan benda mati, dan kemudian secara berurutan disusun dalam posisi yang
berbeda menjadi gamar yang hidup.
Animasi secara umum dapat
didefinisikan sebagai suatu sequence gambar yang ditampilkan pada tenggang
waktu tertentu agar tercipta sebuah ilusi gambar yang bergerak. Pengertian
animasi pada dasarnya ialah menggerakkan objek sehingga tampak lebih dinamis.
Dewasa ini, banyak software-software untuk membuat animasi, antara lain :
Studio Max, Macromedia, Blender dan lain-lain.
BAB II
Object Collision modeling in 3D
Object collision modeling(tabrakan) melibatkan banyak asumsi
dan perkiraan, termasuk konsep suatu ‘impuls atau dorongan’ yang tidak terlalu
jelas. Hal tersebut akan kami diskusikan pada materi 3D object collision
modeling.
Salah satu hal yang sulit pada collision modeling adalah
memahami bagaimana suatu objek bekerja dengan objek lain yang memiliki gerakan
rotasi dan linier. Metode utama yang akan kita gunakan untuk melakukan ini
melibatkan beberapa tahap, antara lain :
1.
Menentukan titik tabrakan dan arah normal pada titik
ini.
2.
Menghitung impuls atau dorongan minimum untuk mencegah
objek berpotongan atau untuk membalik kecepatan, tergantung pada koefisien
friksi.
3.
Menghitung efek impuls ini pada gerakan rotasi dan
linier secara terpisah.
Hasil
untuk kasus 3D ini kami rangkum sebagai berikut:

Keterangan :
ARAH
Ketika kita mengerjakan persamaan ini secara manual, terlihat
cukup mudah untuk menentukan arah impuls dan tanda pada istilah-istilah di atas.
Tapi karena ini bagian dari program komputer, maka sangatlah penting untuk
memahami ketentuan yang kita asumsikan dan untuk mendapatkan tanda yang benar.
Pada diagram berikut ini, anak panah mengindikasikan arah
positif, bukan kecepatan absolut yang mungkin saja arah negatif.

Dalam
hal ini, vai> vbi
sebelum tabrakan dan vaf<=
vbf setelah tabrakan. Jadi, impuls mengurangi
momentum dari objek a dan menambahkannya ke objek b sehingga kita mendapatkan
rumusannya sebagai berikut:
vaf
= vai - J/Ma
vbf
=vbi + J/Mb
Sekarang
kita membalik ukuran objek a dan objek b

Dalam
kasus ini, vbi> vai
sebelum tabrakan dan vbf <=
vaf setelah tabrakan. Jadi, impuls mengurangi
momentum dari objek b dan menambahkannya ke objek a sehingga kita mendapat
rumusannya sebagai berikut:
vaf
= vai + J/Ma
vbf
=vbi - J/Mb
Sekarang tampaknya kurang efektif/kacau untuk mendapatkan
program untuk menguji yang mana kecepatan tertinggi dan menentukan persamaan
mana yang akan digunakan, sehingga akan lebih mudah menggunakan J negatif untuk
mengindikasikan kasus kedua. Jika kamu melakukan ini, perhatikan bahwa J
negatif tidak berarti ia menarik, bukan mendorong. Itu hanya berarti bahwa
objek-objek bertabrakan pada arah yang lain.
Rotasi Arah
Hal tersebut akan menjadi lebih rumit dengan adanya rotasi
dalam momentum angular(sudut) yang harus diukur relatif dahulu terhadap titik
tertentu. Jika objek ‘a’ berputar searah jarum jam pada pusat massanya, mungkin
ia memberikan momentum berlawanan arah jarum jam pada objek ‘b’ pada pusat
massanya. Namun, hal ini tidak akan mengubah momentum angular dari keseluruhan
sistem, bahkan untuk suatu sistem tertutup, dikarenakan gerakan linier dari pusat massa yang berbeda.

Kecepatan
pada titik tabrakan objek ‘a’ = VPA = VCA + ωa × (r-pa)
Kecepatan
pada titik tabrakan objek ‘b’ = VPB = VCB + ωb × (r-pb)
Pada kasus 1D, kita dapat memulai dengan definisi koefisien
restitusi yang merupakan rasio kecepatan bertemu dan memencar.
Namun, dalam kasus ini, kecepatan bukanlah kecepatan dari
pusat massa, melainkan kecepatan suatu titik (pada koordinat absolut) dari
suatu benda padat. Inilah yang merupakan titik-titik pada suatu benda yang
sebenarnya bertubrukan.
e = (vaf- vbf) / (vai - vbi)
dimana
|
definisi lain
|
||
Simbol
|
Unit
|
Jenis
|
Unit
|
vcaf
|
kecepatan akhir titik tubrukan pada objek a
|
vektor
|
m/s
|
vcai
|
kecepatan awal titik tubrukan pada objek a
|
vektor
|
m/s
|
vcbf
|
kecepatan akhir titik tubrukan pada objek b
|
vektor
|
m/s
|
vcbi
|
kecepatan awal titik tubrukan pada objek a
|
vektor
|
m/s
|
e
|
koefisien restitusi yang bergantung pada natur dua materi yang
bertubrukan
|
skalar
|
Tidak ada
|
Δvca = vcai - vcaf
Ini
merupakan perubahan kecepatan titik tabrakan pada benda ‘a’ yang disebabkan
oleh impuls.
Δvcb = vcbi - vcbf
Ini
merupakan perubahan kecepatan titik tabrakan pada benda ‘b’ yang disebabkan
oleh impuls.
Sehingga didapatkan :
e *
(vcai - vcbi)= -(vcaf- vcbf)
(e+1)
* (vcai - vcbi)= -(vcaf- vcbf)+(vcai - vcbi)
(e+1)
* (vcai - vcbi)= Δvca + Δvcb
Dari
relasi Δvca dan Δvcb dengan impuls (J) maka kita mendapatkan:
ΔVp = J/M + ([I]-1(J × r)) × r
dimana
|
definisi lain
|
|||
simbol
|
deskripsi
|
jenis
|
Unit
|
|
Vp
|
Kecepatan linier suatu partikel pada benda padat (vektor)
|
vektor
|
m/s
|
|
J
|
Impulse
|
Vektor
|
||
I
|
skalar inersia seperti torsi = I * alpha (benar hanya jika objek
simetris)
|
Skalar
|
||
[I]
|
inersia tensor
|
matriks 3×3
|
||
m
|
massa
|
skalar
|
Kg
|
|
•
|
• = produk dot
|
|||
×
|
× = produk cross
|
|||
r
|
posisi partikel relatif terhadap pusat massa – NB: ini berada
pada koordinat absolut, bukan koordinat benda lokalsehingga ini menjadi
fungsi waktu jika benda berotasi.
|
Vektor
|
||
Sehingga
kita mendapatkan:
(e+1) * (vai - vbi)= J/Ma +([Ia]-1(J × ra))
x ra + J/Mb +([Ib]-1(J × rb)) x rb
Kita ingin memecahkan persamaan di atas untuk mendapatkan J.
Untuk melakukannya, kita perlu memisahkan J ke bagian kanan. Arah impuls akan
bergantung pada natur material yang bertubrukan dan koefisien friksinya. Jika
friksi tinggi, impuls akan berada di arah yang mendatangi titik tubrukan. Jika
friksi rendah, impuls akan tegak lurus terhadap permukaan tubrukan. Tidak ada
impuls yang parallel terhadap permukaan karena mereka dapat tergelincir di arah
tersebut. Jadi, memisahkan impuls dalam besaran dan arah dapat membuat friksi
diperhitungkan dan memungkinkan besaran impuls dikeluarkan dari sisi kanan
sebagai istilah biasa.
J = n*|J|
dimana
|
definisi lain
|
||||
simbol
|
deskripsi
|
jenis
|
Unit
|
||
n
|
vektor
normal yang memberikan arah impuls
|
Vektor
|
|||
J
|
vektor
impuls
|
Vektor
|
|||
|J|
|
besaran
impuls
|
Skalar
|
|||
Dengan
asumsi bahwa ada solusi yang perlu kita buat
([Ia]-1(J × ra)) × ra = |J| *
([Ia]-1(n × ra)) × ra
Maka Hasilnya
adalah:
|J| = (e+1) * (vai - vbi)
/ (1/Ma +n•([Ia]-1(n × ra)) x ra + 1/Mb +n•([Ib]-1(n ×
rb)) × rb)
Kode


Metode Alternatif Menggunakan Matriks
Ide yang bagus untuk mengekspresikan semua istilah ialah
dengan menggunakan jenis aljabar yang sama. Tidak mungkin mengekspresikan
inersia tensor secara murni dalam istilah vektor atau quaternion. Dalam hal ini apakah mungkin kita bisa menghitung murni
dalam term matriks?
Relasi antara impuls J dan perubahan kecepatan titik dimana J
diterapkan, diperoleh di bawah ini:

Perubahan
kecepatan linier suatu titik pada benda padat yang disebabkan
J = J/M + ([I]-1(J × r)) × r
dimana
|
definisi lain
|
||
simbol
|
deskripsi
|
jenis
|
Unit
|
ixx to izz
|
elemen dari inersia tensor (pada koordinat absolut)
|
||
rx,ry and rz
|
|||
Maka kita dapat menyimpulkan efek J terhadap
kecepatan relatif benda A dan B:


Perubahan
kecepatan relatif linier dari titik tabrakan yang disebabkan J = (e+1) * (vai
– vbi)
Oleh
karena itu, kita perlu menginvert maktriks ini untuk mendapatkan ekspresi J
dalam term kecepatan approach.
Metode Lainnya
·
Solusi dengan impuls
·
tabrakan inelastis sempurna
·
tabrakan elastis sempurna
·
Solusi dengan konservasi momentum dan energi
Solusi dengan Impuls
Impuls
yang ditransfer antarobjek = [NEMa]* (vaf - vai)= -[NEMb]*(vbf
- vbi) dimana:
·
[NEMa] = Matriks
Newton-Euler untuk objek a; ini merupakan matriks 6x6.
·
[NEMb] = Matriks
Newton-Euler untuk objek b; ini merupakan matriks 6x6.
·
vaf=
kecepatan akhir objek a. Ini merupakan vektor 6 dimensi yang mengandung
komponen-komponen linier dan rotasi di semua 3 dimensi.
·
vai=
kecepatan awal objek a. Ini merupakan vektor 6 dimensi yang mengandung
komponen-komponen linier dan rotasi di semua 3 dimensi.
·
vbf=
kecepatan akhir objek b. Ini merupakan vektor 6 dimensi yang mengandung
komponen-komponen linier dan rotasi di semua 3 dimensi.
·
vbi=
kecepatan awal objek b. Ini merupakan vektor 6 dimensi yang mengandung
komponen-komponen linier dan rotasi di semua 3 dimensi.
Catatan
: Saya mengasumsikan bahwa pada kasus elastis, hanya bagian linier impuls yang
ditransfer antarobjek. Oleh karena itu, torsi eksternal selalu nol sehingga
persamaan di atas menjadi benar. Pada kasus inelastis, mungkin ada impuls rotasi yang ditransfer.
Satu-satunya situasi yang dapat saya pikirkan dimana impuls rotasi akan muncul adalah saat terjadi tubrukan dua massa yang berotasi pada ulir sekrup yang sama. Adakah yang dapat membantu saya mengklarifikasi hal ini? Apakah kita perlu mempertimbangkan komponen impuls rotasi pada tubrukan objek padat yang mengambang bebas?
Satu-satunya situasi yang dapat saya pikirkan dimana impuls rotasi akan muncul adalah saat terjadi tubrukan dua massa yang berotasi pada ulir sekrup yang sama. Adakah yang dapat membantu saya mengklarifikasi hal ini? Apakah kita perlu mempertimbangkan komponen impuls rotasi pada tubrukan objek padat yang mengambang bebas?
Tabrakan
inelastis sempurna
Pertama-tama kita mengambil
kasus tabrakan inelastis sempurna (dimana objek saling menempel setelah
tabrakan) dan kecepatan akhir mereka sama. Jadi,
vaf=
vbf (ini tidak sepenuhnya benar karena ketika objek saling menempel, mereka
akan mulai saling mengitari satu sama lain, tetapi mereka akan memiliki
kecepatan rata-rata yang sama dimana kecepatan ini merupakan kecepatan pusat
massa)
[NEMa]* (vaf - vai)= -[NEMb]*(vbf - vbi)
Bila
vaf disubstitusi dengan vbf maka:
[NEMa]* (vaf -
vai)= [NEMb]*(-vaf+vbi)
Kita ingin menemukan nilai dari vaf.Saat mengalikan
maktriks suatu vektor, perkalian lebih distributif dibandingkan penambahan
sehingga
[NEMa]* vaf- [NEMa]*vai=[NEMb]*vbi-
[NEMb]*vaf
Kita
dapat menyusun ulang vektor ini untuk mendapatkan:
[NEMa]* vaf+ [NEMb]*vaf = [NEMb]*vbi +
[NEMa]*vai
Kami tidak tahu banyak tentang matriks aljabar untuk
memprosesnya lebih jauh, sehingga kami akan menjabarkannya demikian:


Mungkin
ada suatu jalan dimana kita dapat menggantikan dua matriks pada bagian kiri
persamaan dengan suatu matriks tunggal yang merepresentasikan inersia atau
massa dari objek yang bergabung. Ini juga merupakan masalah pada bagian awal
dimana dua objek saling mengitari satu sama lain sehingga memiliki matriks
inersia atau massa yang berbeda. Jadi, didapatkan :
[NEMcombined]* vaf = [NEMb]*vbi
+ [NEMa]*vai
Maka
solusinya adalah:
vaf= vbf =[NEMcombined]inverse * ( [NEMb]*vbi
+ [NEMa]*vai )
Nilai
dari impuls adalah:
impulse = [NEMa]* (vaf - vai)
impulse = [NEMa]*
([NEMcombined]inverse* ( [NEMb]*vbi + [NEMa]*vai ) - vai)
Tubrukan
elastis sempurna
Pada kasus ini, diasumsikan bahwa
persamaan impuls sama dengan kasus inelastis (tetapi nilainya menjadi dua kali
lipat sebab objek-objek yang terpisah pada kecepatan yang sama).
Saya tidak berpikir bahwa ini
merupakan kasus yang tepat sebab pada kasus 3D tanpa friksi, impuls seharusnya
normal terhadap permukaan tubrukan dan impuls rotasi seharusnya nol. Apakah ada
yang dapat memberikan ide bagaimana menghitung nilai impuls ini?
impulse = 2 [NEMa]* ([NEMcombined]inverse * (
[NEMb]*vbi + [NEMa]*vai ) - vai)
Kecepatan
akhir = kecepatan awal + impuls
vaf= vai + 2
[NEMa]* ([NEMcombined]inverse * ( [NEMb]*vbi + [NEMa]*vai ) - vai)
Solusi dengan
konservasi momentum dan energy
Dengan konservasi momentum linier:

Dengan
konservasi momentum angular:


dimana
semua rotasi pada persamaan di atas hampir sama seperti pada kasus 2D. Jika
kita ingin mengukur rotasi objek itu sendiri pada pusat massanya, kita perlu
menerapkan teorema sumbu paralel dimana akan menambah variable lain pada
persamaan di atas.
Dengan
konservasi energi



Ini
menghasilkan 7 persamaan dengan 12 variabel yang tidak diketahui sehingga kita
membutuhkan informasi tambahan untuk memecahkannya:
·
kecepatan
a : vafx, vafy, dan vafz
·
kecepatan
b : vbfx, vbfy, dan vbfz
·
rotasi a
terhadap sumbu x : wax
·
rotasi a
terhadap sumby y : way
·
rotasi a
terhadap sumbu z : waz
·
rotasi b
terhadap sumbu x : wbx
·
rotasi b
terhadap sumby y : wby
·
rotasi b
terhadap sumbu z : wbz
Jadi, ada ketidakcukupan informasi untuk memecahkan persamaan
ini sehingga kita perlu menambah informasi tambahan seperti batasan-batasan
yang dapat diterapkan atau penerapan ‘sudut insidensi = sudut pencerminan’.
Walaupun kita memiliki informasi yang cukup untuk memecahkan
kasus umum, persamaan tersebut masih sangat rumit untuk dapat dipecahkan dalam
kasus umum. Khususnya karena kita tidak bekerja dalam frame-of-reference dari bentuk-bentuk individual, maka secara umum
variabel I (Inersia) merupakan suatu fungsi sudut-sudut objek. Gerakan rotasi
objek membuat persamaan tersebut menjadi semakin rumit sehingga kita perlu
menggunakan pendekatan yang berbeda seperti berikut:


Asumsikan bahwa kita bergerak ke frame referensi bentuk 1, maka bentuk 1 akan selalu muncul
stasioner pada frame ini. Pergerakan
bentuk 2 akan lebih mudah dihitung pada frame
ini, misalnya jika kita mengasumsikan bahwa impuls berada pada arah normal saja
(tidak ada pergeseran). Oleh karena itu, pergerakan paralelnya terhadap bidang
datar akan konstan dan pergerakan normalnya terhadap bidang datar akan terbalik
selama tabrakan. Mungkin ada energi yang ditransfer antara pergerakan linier
dan angular, bergantung pada posisi
relatif pusat massa bentuk 2 dan titik tabrakan, namun sebagai perkiraan
pertama, apakah mungkin kita mengabaikan hal tersebut?
Kita masih harus menghitung bagaimana pergerakan frame-of-reference telah berubah selama
tabrakan, tetapi ini relatif mudah menggunakan konservasi momentum.
Jadi, bagaimana memindahkan bentuk 1 ke frame-of-reference? Yang harus kita lakukan adalah memindahkan
bentuk 2 di bawah bentuk 1 pada scene
graph, jangan lupa terjemahkan semua parameter yang terkait dengan bentuk.
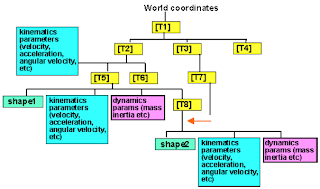

Jadi,
transform [T8] memberikan posisi bentuk 2 relatif terhadap bentuk 1 dimana
dalam kasus ini:
[T8] = [T7][T3][inverse T2][inverse T5]
Jangan
lupa kita harus mentransform semua parameter kinematis dan dinamis untuk bentuk
2.
Komponen Rotasi untuk contoh 3D di atas
Jika kita mengasumsikan bahwa kedua objek menjelajahi ruang
bebas (tidak ada torsi eksternal), ketika mereka bertabrakan maka mereka akan
menjelajahi ruang bebas lagi.
Seperti dijelaskan di atas, rotasi awal diketahui dan kita
ingin menentukan rotasi akhir. Pada saat tubrukan, energi dapat ditransfer
antara objek-objek yang bertabrakan dan antara energi linier dan rotasi.
Hukum konservasi momentum dan energi di atas tidak cukup
untuk menentukan kecepatan akhir. Kita perlu mencari faktor lain yang
ditentukan oleh geometri objek.
Salah satu faktor adalah objek-objek hanya dapat berotasi
pada sumbu tertentu (tidak ada torsi). Jika objek merupakan suatu bulatan
sempurna (atau minimal variable inersianya sama di semua arah), objek dapat
berotasi pada semua arah, namun minimal kita adapat menggunakan bentuk
simetrisnya untuk menyederhanakan persamaan. Jika objek tidak simetris, mereka
hanya dapat berotasi pada sumbu tertentu dimana ini akan membatasi hasil yang
diharapkan.
Faktor lainnya adalah posisi titik dampak relatif terhadap
pusat massa dua objek.
Jika ini terlalu rumit, kamu dapat mempertimbangkan
pendekatan numeris lainnya terkait dengan tabrakan.
Minutes of meeting




Tidak ada komentar:
Posting Komentar